TRL cuts RL sync to 6 seconds, Reachy Mini drops cloud voice APIs
Hugging Face's TRL drops the RDMA requirement for RL weight sync and Reachy Mini drops cloud voice APIs, each exposing a new bottleneck.
TRL cuts RL sync to 6 seconds, Reachy Mini drops cloud voice APIs
TL;DR
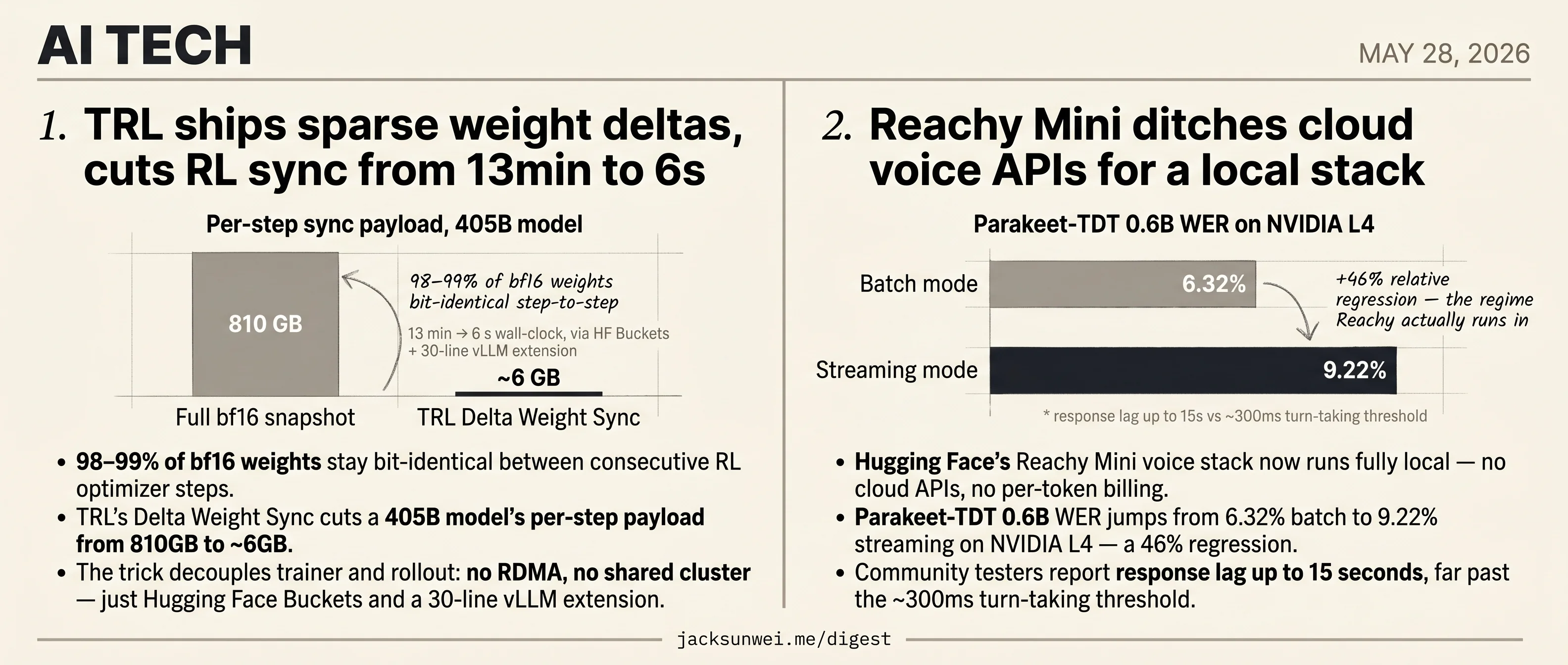
- TRL’s Delta Weight Sync drops a 405B model’s per-step payload from 810GB to ~6GB.
- 98-99% of bf16 weights stay bit-identical between consecutive RL optimizer steps.
- Reachy Mini runs Parakeet-TDT 0.6B fully local on an NVIDIA L4 with no cloud APIs.
- Streaming WER regresses 46% versus batch on the same L4.
- Response lag hits 15 seconds, past the 300ms turn-taking threshold.
Two Hugging Face ships today, and both make the same trade: drop a heavyweight central dependency, accept a new bottleneck somewhere else. TRL’s Delta Weight Sync observes that 98-99% of bf16 weights are bit-identical between RL optimizer steps, ships only the sparse delta through Hugging Face Buckets and a 30-line vLLM extension, and cuts a 405B model’s per-step payload from 810GB to ~6GB — no RDMA, no shared cluster. PULSE and Cursor’s Composer 2 independently reproduced the sparsity result this week.
Reachy Mini’s voice stack makes the analogous trade in robotics: Parakeet-TDT 0.6B runs fully local on an NVIDIA L4, ending per-token cloud billing. The ceiling moves with it. Streaming WER regresses 46% against batch, response lag hits 15 seconds against a 300ms turn-taking threshold, and the smooth demos lean on an XMOS XVF3800 doing AEC and beamforming in silicon. Decoupling worked. Where the next limit lives is the story.
TRL ships sparse weight deltas, cuts RL sync from 13min to 6s
Source: huggingface-blog · published 2026-05-27
TL;DR
- 98–99% of bf16 weights stay bit-identical between consecutive RL optimizer steps.
- TRL’s Delta Weight Sync cuts a 405B model’s per-step payload from 810GB to ~6GB.
- The trick decouples trainer and rollout: no RDMA, no shared cluster — just Hugging Face Buckets and a 30-line vLLM extension.
- PULSE and Cursor’s Composer 2 independently reproduce the sparsity result on their own RL stacks.
- Staleness past 8–32 steps and generation-side bottlenecks remain the unresolved limits.
The sparsity nobody was exploiting
Async RL’s dirty secret is that the trainer ships the same bytes to the inference engine over and over. Hugging Face’s TRL team measured what actually changes between optimizer steps on Qwen3, Llama-3.2, and Gemma-3 and found that 98–99% of bf16 weights are bit-identical step-to-step. The cause is arithmetic, not laziness: bf16 has 7 mantissa bits, so any update smaller than |w|/256 gets rounded away. At RL learning rates around 3×10⁻⁶, most updates fall below that threshold. As the blog puts it, “the optimizer is whispering, and bf16 cannot hear it.”
This isn’t a Hugging Face-only observation. The independent PULSE paper measured the same effect across model families from 0.5B to 7B and reduced a 7B sync from 14GB to ~108MB — over 100× — while keeping trainer and worker weights bit-identical 1. Cursor’s Composer 2 team hit ~2% changed weights on their own RL stack, cutting a 1TB snapshot to a 20GB delta, and went further by applying deltas mid-rollout so late-trajectory tokens stay near-policy 2. Three independent groups converging on the same number is the signal that delta sync is becoming default architecture, not a clever hack.
The architecture is the actual news
The sparsity result is reproduced. What TRL ships that’s genuinely new is the disaggregated pipeline: trainer and rollout workers no longer need to share a cluster, an RDMA fabric, or even a cloud region.
flowchart LR
T[Trainer GPU] -->|sparse safetensors: mask + indices + values| B[(HF Bucket / Xet)]
T -.->|anchor every N steps| B
B -->|delta pull| V1[vLLM rollout worker]
B -->|delta pull| V2[vLLM rollout worker]
V1 -->|trajectories| T
V2 -->|trajectories| T
The wire format is sparse safetensors — a boolean mask plus int32 indices and bf16 values — pushed to Hugging Face Buckets, the mutable S3-like layer HF launched two months earlier at $12/TB/month public, $18 private, with generous egress 3. Xet’s content-defined chunking does the heavy deduplication: an independent benchmark shows modifying 1% of a 500MB file transfers only 5.5MB, and a 1MB append to a 5GB SQLite file drops from 13 minutes via LFS to 0.1s under Xet 4. Delta Weight Sync is effectively the flagship workload that justifies the Buckets/Xet stack existing.
On Qwen3-0.6B the per-step payload drops from 1.2GB to 20–35MB; in a Wordle rollout, the inference-paused window per sync shrinks to ~1.1s.
What the post underplays
PULSE’s authors flag two limits the blog skates over: sparsity degrades gracefully past 8–32 steps of staleness, and the effect is specific to RL post-training learning rates — gradients themselves remain dense, so SFT or higher-LR regimes won’t see the same collapse 5. Framework analysts add a second caveat: even if weight sync drops to seconds, generation itself can consume up to 90% of RL wall-clock on reasoning models, so the headline “1.1s paused window” understates where the real bottleneck now sits 6.
The competitive picture matters too. Moonshot’s checkpoint-engine syncs a 1T model in ~20s via CUDA IPC, and THUDM/slime ships an NCCL-based delta engine — both faster in-cluster but requiring colocation. TRL’s bet is the commodity-internet path: weights through object storage stops being a hack when the payload is two orders of magnitude smaller.
Reachy Mini ditches cloud voice APIs for a local stack
Source: huggingface-blog · published 2026-05-27
TL;DR
- Hugging Face’s Reachy Mini voice stack now runs fully local — no cloud APIs, no per-token billing.
- Parakeet-TDT 0.6B WER jumps from 6.32% batch to 9.22% streaming on NVIDIA L4 — a 46% regression.
- Community testers report response lag up to 15 seconds, far past the ~300ms turn-taking threshold.
- Smooth demos depend on the XMOS XVF3800 doing AEC and beamforming in silicon.
What shipped
Hugging Face has published a fully local, open-source speech-to-speech stack for the Reachy Mini robot. No OpenAI Realtime endpoint, no per-token billing, no cloud round-trip. The speech-to-speech library exposes a WebSocket compatible with the Realtime API, so the Reachy desktop app just points at a workstation IP on the LAN.
The architecture is a classic cascade — four swappable models, each chosen for CPU- or laptop-class inference:
flowchart LR
Mic[XMOS XVF3800<br/>360° capture + AEC] --> VAD[Silero VAD v5]
VAD --> STT[Parakeet-TDT 0.6B v3]
STT --> LLM[llama.cpp / vLLM / MLX<br/>Gemma-4 or Qwen3-4B]
LLM --> TTS[Qwen3-TTS]
TTS --> Spk[Speaker]
Spk -. echo leak .-> Mic
The LLM is decoupled via a Responses API protocol, with llama.cpp recommended for general use (Flash Attention on, sliding-window attention for Gemma, 64k context), vLLM for MTP-accelerated setups, and MLX for Apple Silicon. It’s a clean piece of plumbing.
Where the seams show
The post sells Parakeet-TDT 0.6B v3 as “streaming-friendly,” but independent benchmarking on NVIDIA L4 shows WER climbing from 6.32% in batch mode to 9.22% in streaming — a ~46% relative regression 7. That’s exactly the regime Reachy runs in. Purpose-built streaming ASR like Nemotron-Speech-Streaming preserves batch accuracy more cleanly; the choice is defensible but the tradeoff goes unmentioned.
The TTS leg has parallel fine print. Qwen3-TTS at 0.6B is unstable on long-form generation, with unnatural pauses and artifacts that only the 1.7B variant reliably avoids 8. Short turn responses are fine; anything paragraph-length will tell on the smaller model.
Latency and the “wireless” asterisk
A cascaded pipeline compounds delay at every hop, and the LLM dominates. Hands-on reports from r/robotics cite a perceived ~30% success rate for fast, relevant answers, with response lag as high as 15 seconds during live interactions 9 — orders of magnitude past the ~300ms human turn-taking threshold.
Hugging Face acknowledges this by recommending workstation offload, and shipping-thread chatter confirms the onboard Pi is “often insufficient” for the LLM step 10. The Wireless SKU is also gated by a localized RAM shortage in 2026 10, so most readers acting on this post are running the Lite tethered to a laptop. “Wireless” is aspirational; the robot is wireless, the brain is not.
Why it works at all: XMOS
The most-requested feature in the speech-to-speech library is integrated acoustic echo cancellation — still an open issue, with developers reporting “missing first words” and audio breaks at low play_steps_s values 11. Reachy Mini largely escapes this because the XMOS XVF3800 front-end does AEC, beamforming, and 360° far-field capture in silicon, so the robot can keep listening while its own motors and speaker are active 12.
The local pipeline works on Reachy Mini partly because the hardware compensates for a software gap that bites other deployments of the same stack.
Takeaway
Treat this as a research and education stack, not a production social-robot recipe. The components are state-of-the-art for offline batch work and merely adequate for streaming conversation; the latency budget is dominated by an LLM the spec’d hardware can barely host; and the cleanest demos lean on DSP silicon to mask an unresolved library gap. The plumbing is real and worth running — just budget a workstation and lower your turn-taking expectations.
Footnotes
-
PULSE paper (arxiv 2602.03839) — https://arxiv.org/html/2602.03839v2
↩PULSESync transmits lossless, sparse BF16 patches rather than full checkpoints, reducing payload sizes by over 100× (e.g., from 14 GB to ~108 MB for a 7B model) while ensuring trainer and worker weights remain bit-identical.
-
Medium — ‘How Cursor Trains Agentic Models with RL’ — https://medium.com/design-bootcamp/how-curosr-trains-agentic-models-with-rl-f8b548e60dad
↩Because only about 2% of weights typically change between consecutive RL checkpoints, this reduces a 1-terabyte snapshot to a manageable 20-gigabyte delta, enabling synchronization via commodity cloud storage rather than specialized RDMA fabrics… inference workers can apply these weight updates ‘in-flight’ mid-rollout.
-
Hugging Face blog — ‘Storage Buckets’ — https://huggingface.co/blog/storage-buckets
↩Buckets are non-versioned containers optimized for the mutable side of AI development, such as training checkpoints, optimizer states, and agent traces… Public Buckets start at $12/TB/month, Private Buckets at $18/TB/month, with egress and CDN usage included up to an 8:1 egress-to-storage ratio.
-
00f.net — ‘Xet intro’ — https://00f.net/2026/01/19/xet-intro-1/
↩Modifying 1% of a 500MB file resulted in only 5.5MB of data transferred—a 99% bandwidth saving compared to LFS… For a 5GB SQLite database, appending a mere 1MB of data reduced the update time from 13 minutes (via LFS) to just 0.1 seconds under Xet.
-
r/reinforcementlearning discussion of PULSE — https://www.reddit.com/r/reinforcementlearning/comments/1qwnypp/pulse_100x_bandwidth_reduction_makes_distributed/
↩Sparsity is robust up to a staleness of 8-32 steps; exceeding these bounds leads to ‘graceful degradation’ in sparsity, which could eventually bottleneck communication in extremely asynchronous setups. Gradients themselves remain dense; the sparsity only emerges at the weight-update level due to low learning rates.
-
hanifleo.com — ‘Anatomy of RL Frameworks’ — https://www.hanifleo.com/anatomy-of-rl-frameworks/
↩Rank 0 typically has limited device memory, it must often load and broadcast parameters layer-by-layer or even dump weights to disk as checkpoints before relaying them to inference workers… generating long chain-of-thought sequences can account for up to 90% of total training time.
-
E2E Networks ASR benchmark (NVIDIA L4) — https://www.e2enetworks.com/blog/benchmarking-asr-models-nvidia-l4-parakeet-whisper-nemotron
↩Parakeet-TDT 0.6B WER regresses from 6.32% in batch mode to 9.22% in streaming mode — a 46% relative increase
-
Medium — High-Quality Long-Form TTS with Qwen3 — https://medium.com/data-science-collective/high-quality-long-form-tts-with-qwen3-open-weight-models-cdd6e3d00df0
↩the Qwen3-TTS 0.6B model is unstable in long-form text, producing unnatural pauses or artifacts compared to the robust 1.7B version
-
r/robotics — Reachy Mini behavior iteration thread — https://www.reddit.com/r/robotics/comments/1ntkmfj/spent_last_month_iterating_on_new_behaviors_for/
↩perceived success rate of only ~30% for fast, relevant answers, with response lag as high as 15 seconds during live interactions
-
r/ReachyMiniDev — shipping ETA thread — https://www.reddit.com/r/ReachyMiniDev/comments/1rtlmbn/if_you_are_wondering_when_your_reachy_mini_robot/
↩ ↩2localized RAM shortage has specifically impacted the Wireless variant; the onboard Pi is often insufficient for heavy LLM tasks, so developers offload the ‘brain’ to a workstation while keeping the daemon on the Pi
-
huggingface/speech-to-speech GitHub issues — https://github.com/huggingface/speech-to-speech
↩strong community demand for integrated Acoustic Echo Cancellation (AEC) to prevent the model from ‘hearing’ its own output — currently marked Open; users also report ‘missing first words’ and audio breaks when play_steps_s is set too low
-
XMOS — CES 2026 Reachy Mini XVF3800 announcement — https://www.xmos.com/ces-2026-reachy-mini-powered-by-xvf3800
↩XMOS XVF3800 voice processor provides 360° far-field capture and acoustic echo cancellation so the robot can hear commands while its motors are active